Jetson Orin¶
Jetson Orin is the on-board compute for ToddlerBot. We recommend Jetson Orin NX 16GB due to its cost effectiveness.
Flash the System¶
Follow the instructions on this page to flash the system. We’ve also provided some tips below to help you through the process.
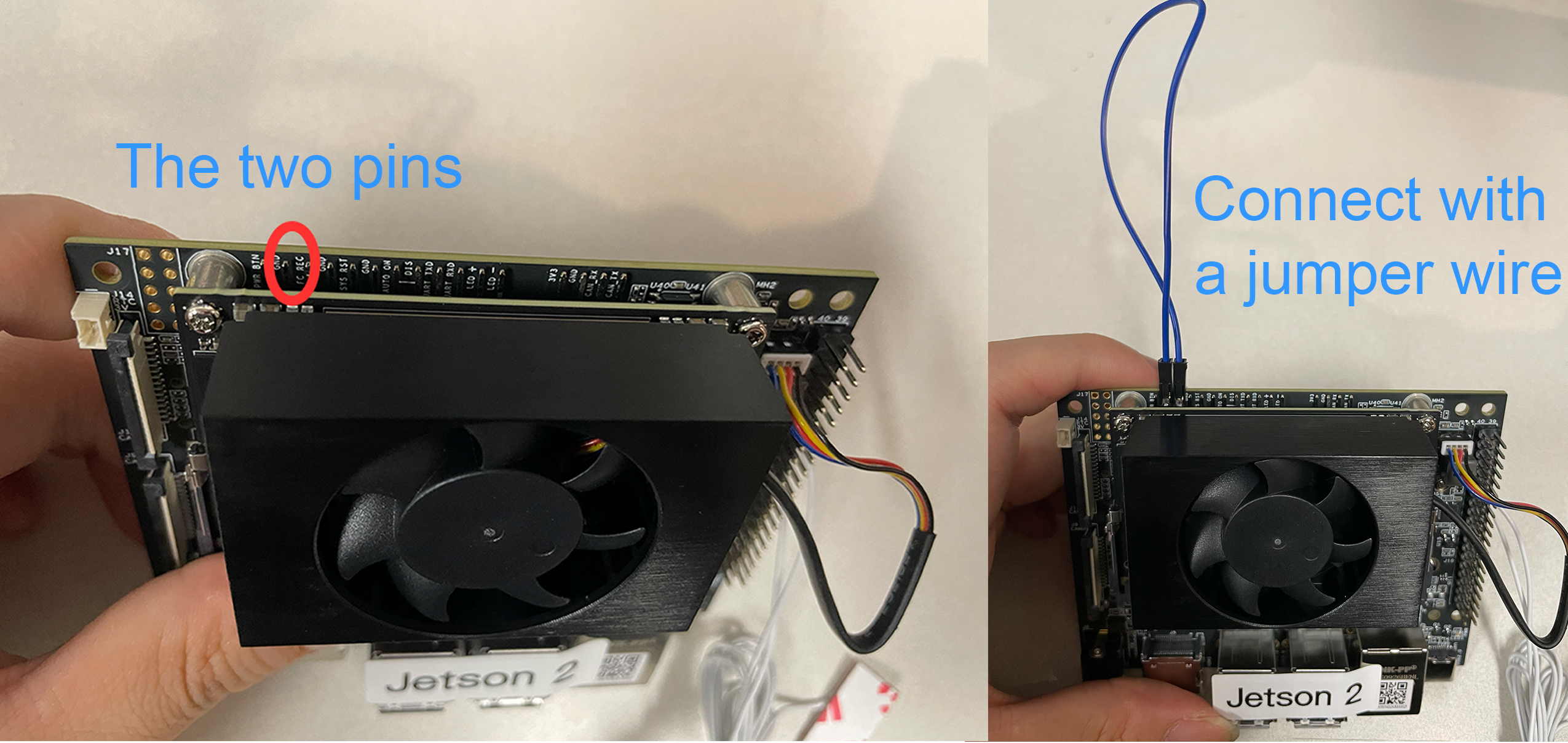
For the Enter Force Recover Mode, you can refer to this photo if the GIF on the page is not clear.
Click on JP6.1 tab and download the image corresponding to Jetson Orin NX 16GB. The download link may be slow—it took us about an hour to download the image.
Important
JetPack 6.1 or newer is strongly recommended, as it includes TensorRT 10.3+, which significantly improves engine build time and inference speed. We only support TensorRT 10+ for stereo depth estimation.
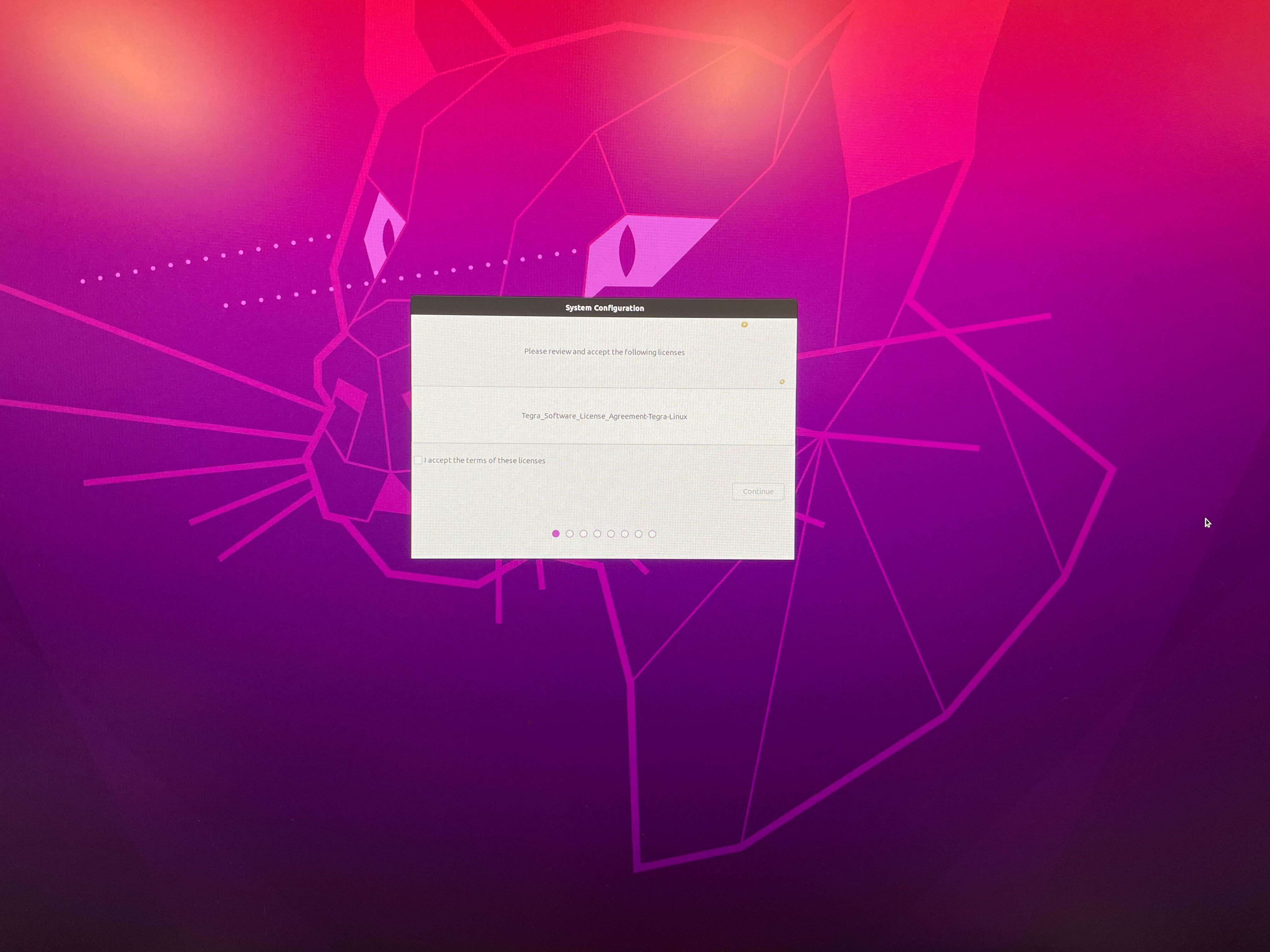
After flashing, unplug the powercable, the USB-C cable and the jumper wire. Replug the power cable, the HDMI cable, the keyboard and the mouse. The system should boot up now. The start screen should look like this:
Enter your username and password.
Set the APP Partition to the max size.
No need to install the Chromium browser.
Power off the Jetson Orin and install the WiFi card like the photo below.

Power on the Jetson Orin and connect to the WiFi.
Press Ctrl + Alt + T to open the terminal. Run
ifconfigto check the IP address of the Jetson Orin. Write down the IP address and the hostname of the Jetson Orin, e.g.,192.168.0.237andtoddy@toddy-desktop.Select the power mode on the top right corner to 0:MAXN.
Now feel free to unplug the HDMI cable, the keyboard and the mouse. We will access the Jetson Orin through SSH for the following steps.
Note
The USB-C port on Jetson is only for flashing, which means transfering data through this port won’t work.
Set up Real-Time (RT) Kernel¶
SSH into the Jetson Orin.
ssh toddy@toddy-desktop.localFollow the instructions on this page to install the real-time kernel. We found that it’s OK to ignore the warning message below, but please open a GitHub issue if you encounter any problem:
Errors were encountered while processing: nvidia-l4t-rt-kernel nvidia-l4t-rt-kernel-oot-modules nvidia-l4t-rt-kernel-headers nvidia-l4t-display-rt-kernel E: Sub-process /usr/bin/dpkg returned an error code (1)
After rebooting, check the kernel version with
uname -r. It should be5.15.136-rt-tegra. The numbers may vary, but-rt-tegrashould be there.
Additional Packages¶
Go through the steps in Setup. Note that
wgetis handy for downloading the Miniforge installer from the terminal.Install
torchandtorchvision.Follow the information on this page and search for
PyTorch for Jetsonto installtorch. For reference, we downloaded the wheel file for PyTorch v2.5.0 with JetPack 6.1 (L4T R36.4) + CUDA 12.6.Follow the information on this page to install
torchandtorchvision. For reference, we downloaded the wheel file for PyTorch v2.3.0 with JetPack 6.0 (L4T R36.2 / R36.3) + CUDA 12.2.We find that the
--content-dispositionoption is useful for downloading the file with the correct name:wget --content-disposition <link/to/the/wheel>
Assuming the toddlerbot conda environment is activated, install the wheels with:
pip install <path/to/the/wheel>
Please do NOT install
numpywhen installingtorchas it will installnumpy 2.xand cause conflicts.Last but not least, run the following command to verify that
jaxandtorchversions are compatible:python examples/test_jax_torch.py --platform jetson
If you encounter any issue with
cuSPARSELt, refer to this page to download the correct version.Install the
ch9344serdriver for the 8-channel communication board:git clone git@github.com:WCHSoftGroup/ch9344ser_linux.git cd ch9344ser_linux/driver/ make sudo make install
We need to install Jetson.GPIO. Revised from instructions on this page, we need to run the following commands to set it up:
sudo groupadd -f -r gpio sudo usermod -aG gpio $USER sudo chown root.gpio /dev/gpiochip0 sudo chmod 660 /dev/gpiochip0 conda activate toddlerbot sudo cp ~/miniforge3/envs/toddlerbot/lib/python3.10/site-packages/Jetson/GPIO/99-gpio.rules /etc/udev/rules.d/ sudo udevadm control --reload-rules && sudo udevadm trigger
To access the imu and dynamixel motors, we need to add the user to i2c and dialout group.
sudo usermod -aG i2c $USER sudo usermod -aG dialout $USER
Now reboot the Jetson Orin. Run
groupsto check if the user is in the i2c, dialout, and gpio group. An example output looks like this:toddy adm dialout cdrom sudo audio dip video plugdev render i2c lpadmin sambashare gdm weston-launch gpio
For the accuracy of teleoperation and logging over network, we need to install ntp package to sync time of the Jetson to server.
sudo apt install ntp ntpdate sudo systemctl enable ntp sudo nano /etc/ntp.conf comment out the following lines: # pool 0.ubuntu.pool.ntp.org iburst # pool 1.ubuntu.pool.ntp.org iburst # pool 2.ubuntu.pool.ntp.org iburst # pool 3.ubuntu.pool.ntp.org iburst # pool ntp.ubuntu.com add: server <ip address of the steam deck> iburst sudo systemctl start ntp
For the fisheye cameras to work, we need to install the following packages:
sudo apt install v4l-utils ffmpeg
For the speaker and microphone to work, we need to install the following packages:
sudo apt install portaudio19-dev flac
For stereo depth estimation using FoundationStereo + TensorRT:
Prerequisites: Ensure JetPack 6.1 or above is installed.
Step 1: Check your CUDA version and set up PyCUDA for GPU acceleration.
Check CUDA version:
cat /usr/local/cuda/version.jsonOr check via
jtopinfo tab. Then set up PyCUDA (replace12.6with your CUDA version):export PATH=/usr/local/cuda-12.6/bin:$PATH export CUDA_ROOT=/usr/local/cuda pip install pycuda
Step 2: Configure TensorRT for the conda environment.
Add TensorRT to Python path:
echo "/usr/lib/python3.10/dist-packages" > $CONDA_PREFIX/lib/python3.10/site-packages/tensorrt_global.pth