I am a third-year CS Ph.D. student at Stanford, advised by C. Karen Liu and Shuran
Song. During my Master's at Stanford, my research
focused on robotics and computer vision, more specifically deformable object manipulation, in
collaboration with Jiajun Wu, Huazhe Xu, and
Yunzhu Li. Previously, during undergraduate at UW-Madison, my work
with Michael Gleicher and Danny Rakita explored motion planning algorithms for robots.
Compliance control is essential for safe physical interaction, yet its adoption
is often limited by force torque sensor requirements. This paper introduces Minimalist Compliance Control, a
plug-and-play method that enables compliant behavior using only motor current or voltage signals, without
force sensors, current control, or learning. The approach is validated on a robot arm, a dexterous hand, and
two humanoid robots across diverse contact-rich tasks.
Most locomotion methods for humanoid robots focus on leg-based gaits, yet natural
bipeds frequently rely on hands, knees, and elbows to establish additional contacts for stability and support
in complex environments. This paper introduces Locomotion Beyond Feet, a comprehensive system for whole-body
humanoid locomotion across extremely challenging terrains, including low-clearance spaces under chairs,
knee-high walls, knee-high platforms, and steep ascending and descending stairs.
Robot Trains Robot: Automatic Real-World Policy Adaptation and Learning for Humanoids
Simulation-based reinforcement learning (RL) has significantly advanced humanoid
locomotion tasks, yet direct real-world RL from scratch or starting from pretrained policies remains rare,
limiting the full potential of humanoid robots. Real-world training, despite being crucial for overcoming the
sim-to-real gap, faces substantial challenges related to safety, reward design, and learning efficiency. To
address these limitations, we propose Robot-Trains-Robot (RTR), a novel framework where a robotic arm teacher
actively supports and guides a humanoid student.
ToddlerBot: Open-Source ML-Compatible Humanoid Platform for Loco-Manipulation
Learning-based robotics research driven by data demands a new approach to robot
hardware design-one that serves as both a platform for policy execution and a tool for embodied data
collection to train policies. We introduce ToddlerBot, a low-cost, open-source humanoid robot platform
designed for scalable policy learning and research in robotics and AI.
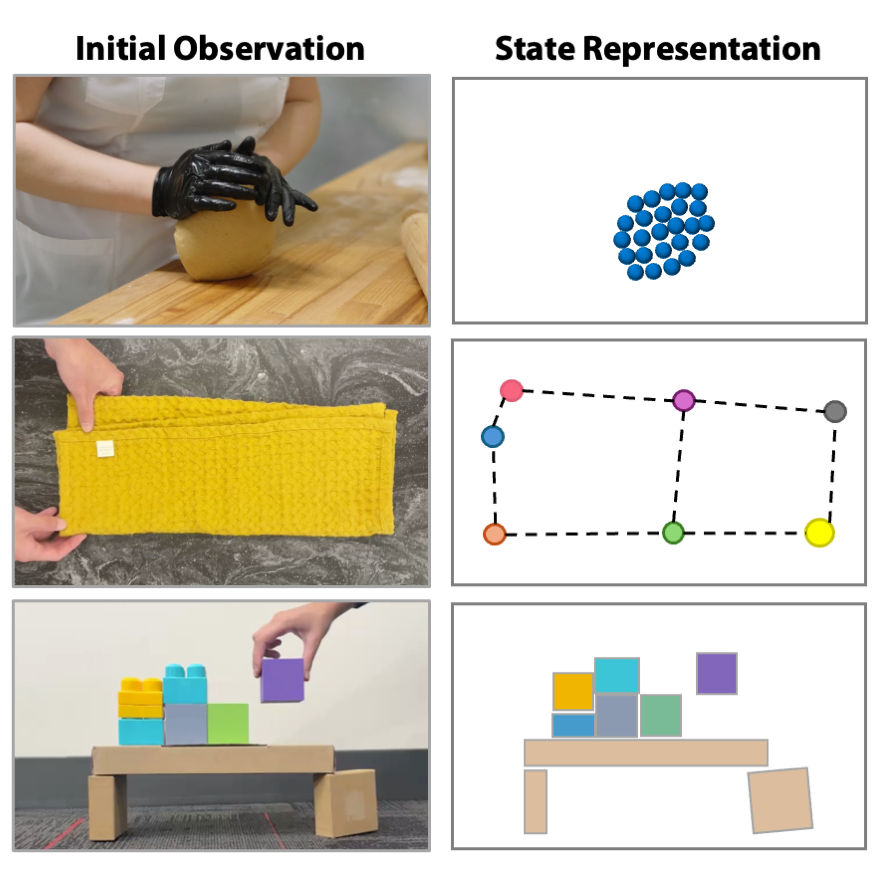
A Review of Learning-Based Dynamics Models for Robotic Manipulation
Dynamics models that predict the effects of physical interactions are essential for
planning and control in robotic manipulation. Although models based on physical principles often generalize
well, they typically require full-state information, which can be difficult or impossible to extract from
perception data in complex, real-world scenarios. Learning-based dynamics models provide an alternative by
deriving state transition functions purely from perceived interaction data, enabling the capture of complex,
hard-to-model factors and predictive uncertainty and accelerating simulations that are often too slow for
real-time control.
FürElise: Capturing and Physically Synthesizing Hand Motions of Piano Performance
Piano playing requires agile, precise, and coordinated hand control that
stretches the limits of dexterity. Hand motion models with the sophistication
to accurately recreate piano playing have a wide range of applications in
character animation, embodied AI, biomechanics, and VR/AR. In this paper,
we construct a first-of-its-kind large-scale dataset that contains approximately 10 hours of 3D hand motion
and audio from 15 elite-level pianists playing 153 pieces of classical music.
DexCap: Scalable and Portable Mocap Data Collection System for Dexterous Manipulation
Imitation learning from human hand motion data presents a promising avenue for
imbuing robots with human-like dexterity in real-world manipulation tasks. Despite this potential, substantial
challenges persist, particularly with the portability of existing hand motion capture (mocap) systems and the
difficulty of translating mocap data into effective control policies. To tackle these issues, we introduce
DexCap, a portable hand motion capture system, alongside DexIL, a novel imitation algorithm for training
dexterous robot skills directly from human hand mocap data.
RoboPack: Learning Tactile-Informed Dynamics Models for Dense Packing
Tactile feedback is critical for understanding the dynamics of both rigid and
deformable objects in many manipulation tasks, such as non-prehensile manipulation and dense packing. We
introduce an approach that combines visual and tactile sensing for robotic manipulation by learning a neural,
tactile-informed dynamics model. Our proposed framework, RoboPack, employs a recurrent graph neural network to
estimate object states, including particles and object-level latent physics information, from historical
visuo-tactile observations and to perform future state predictions.
RoboCraft: Learning to see, simulate, and shape elasto-plastic objects in 3D with graph
networks
Modeling and manipulating elasto-plastic objects are essential capabilities for
robots to perform complex industrial and household interaction tasks (e.g., stuffing dumplings, rolling sushi,
and making pottery). However, due to the high degrees of freedom of elasto-plastic objects, significant
challenges exist in virtually every aspect of the robotic manipulation pipeline, e.g., representing the
states, modeling the dynamics, and synthesizing the control signals. We propose to tackle these challenges by
employing a particle-based representation for elasto-plastic objects in a model-based planning framework.
RoboCook: Long-Horizon Elasto-Plastic Object Manipulation with Diverse Tools
Humans excel in complex long-horizon soft body manipulation tasks via flexible tool
use: bread baking requires a knife to slice the dough and a rolling pin to flatten it. Often regarded as a
hallmark of human cognition, tool use in autonomous robots remains limited due to challenges in
understanding tool-object interactions. Here we develop an intelligent robotic system, RoboCook,
which perceives, models, and manipulates elasto-plastic objects with various tools.
RoboCraft: Learning to See, Simulate, and Shape Elasto-Plastic Objects with Graph
Networks
Modeling and manipulating elasto-plastic objects are essential capabilities
for robots to perform complex industrial and household interaction tasks. However, significant
challenges exist in virtually every aspect of the robotic manipulation pipeline,
e.g., representing the states, modeling the dynamics, and synthesizing
the control signals. We propose to tackle these challenges by employing a
particle-based representation for elasto-plastic objects in a model-based planning framework.
CollisionIK: A per-instant pose optimization method for generating robot motions with
environment collision avoidance
In this work, we present a per-instant pose optimization method that can generate
configurations that achieve specified pose or motion objectives as best as possible over a sequence of
solutions, while also simultaneously avoiding collisions with static or dynamic obstacles in the environment.